Software designed to give spacecraft more autonomy could herald a future where swarms of satellites navigate and complete scientific objectives with minimal human intervention. This innovative approach is being spearheaded by NASA’s Distributed Spacecraft Autonomy (DSA) project, which is testing the capabilities of autonomous satellite swarms at the Ames Research Center in California’s Silicon Valley.
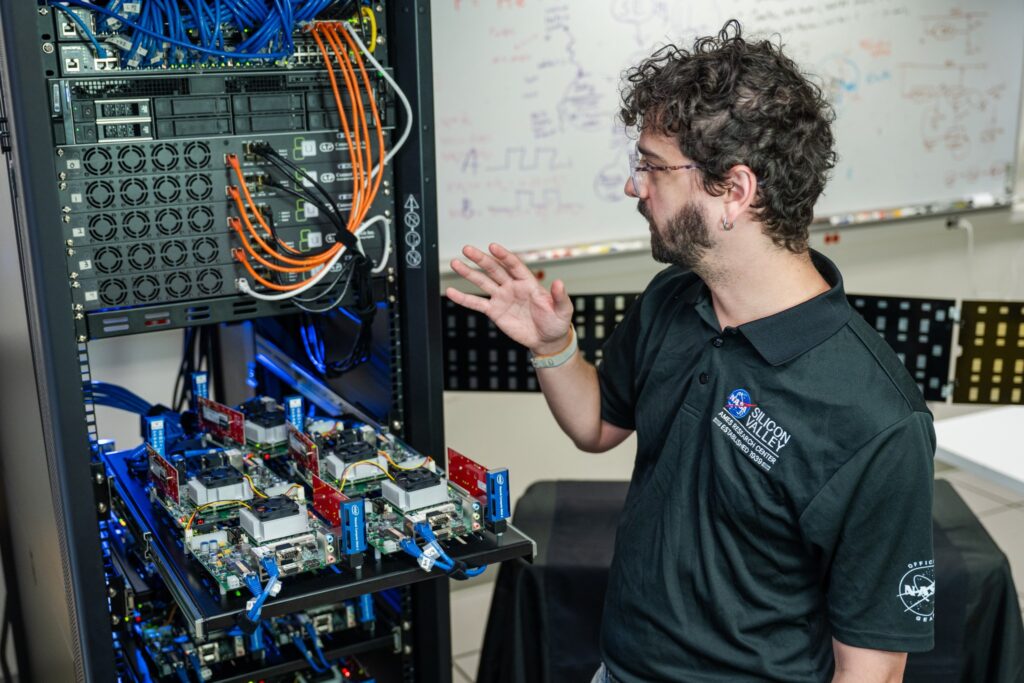
Caleb Adams, the project manager for DSA, oversees the testing of this groundbreaking software alongside a test setup containing 100 spacecraft computers. The DSA project aims to enhance the adaptability of multi-spacecraft missions, efficiently allocate tasks between spacecraft using ad-hoc networking, and enable human-swarm commanding of distributed space missions. This development is critical as astronauts living and working on the Moon and Mars will rely on satellites for navigation, weather updates, and communication relays.
Revolutionizing Space Missions
Long-duration space missions will necessitate collaboration between systems on Earth and those on other planets. Satellites orbiting the Moon, Mars, or other distant areas face significant communication delays with ground operators, which could impede mission efficiency. The DSA project offers a solution by testing shared autonomy across distributed spacecraft missions, allowing spacecraft swarms to conduct self-sufficient research and maintenance with minimal human intervention.
By adding autonomy to satellites, they can provide services without waiting for commands from ground operators. Distributing this autonomy across multiple satellites, akin to a swarm, gives the spacecraft a “shared brain” to achieve objectives that would be impossible individually.
Sharing the Workload
The first in-space demonstration of DSA began with the Starling spacecraft swarm, a group of four small satellites, which has been operational since July 2023. The Starling mission serves as a testing ground for autonomous swarm operations. The swarm initially used DSA to optimize scientific observations, autonomously deciding what to observe without pre-programmed instructions. This autonomy allowed for measurements that might have been missed if an operator had to instruct each satellite individually.
The Starling swarm measured the electron content of plasma between each spacecraft and GPS satellites, capturing rapidly changing phenomena in Earth’s ionosphere. The DSA software enabled the swarm to independently decide what to study and how to distribute the workload across the four spacecraft. If one spacecraft was unable to complete its task, the others could adapt and fulfill the mission’s goals.
The Starling 1.0 demonstration achieved several firsts, including the first fully distributed autonomous operation of multiple spacecraft and the first use of space-to-space communications to autonomously share status information.
A Helping Hand in Orbit
Following DSA’s successful demonstration on Starling 1.0, the team began exploring additional opportunities to use the software to enhance satellite swarm health and efficiency. Continued testing of DSA on Starling’s extended mission included PLEXIL (Plan Execution Interchange Language), a NASA-developed programming language designed for reliable and flexible automation of complex spacecraft operations.
Onboard Starling, the PLEXIL application demonstrated autonomous maintenance, allowing the swarm to manage normal spacecraft operations, correct issues, or distribute software updates across individual spacecraft. This enhanced autonomy makes swarm operation in deep space feasible, reducing the need for constant communication with Earth.
Simulated Lunar Swarming
To understand the scalability of DSA, the team used ground-based flight computers to simulate a lunar swarm of virtual small spacecraft. These computers simulated a swarm providing position, navigation, and timing services on the Moon, akin to GPS services on Earth. The DSA team conducted nearly one hundred tests over two years, demonstrating swarms of various sizes at different lunar orbits.
The lessons learned from these early tests laid the groundwork for additional scalability studies. The second round of testing, set to begin in 2026, will demonstrate even larger swarms using flight computers that could eventually go into orbit with DSA software onboard.
The Future of Spacecraft Swarms
Orbital and simulated tests of DSA are a launchpad for increased use of distributed autonomy across spacecraft swarms. Developing and proving these technologies not only increases efficiency and decreases costs but also enhances NASA’s capabilities, paving the way for autonomous spacecraft swarms to support missions to the Moon, Mars, and beyond.
Milestones:
- October 2018: DSA project development begins.
- April 2020: Lunar position, navigation, and timing (LPNT) simulation demonstration development begins.
- July 2023: DSA launches onboard the Starling spacecraft swarm.
- March 2024: DSA experiments onboard Starling reach the necessary criteria for success.
- July 2024: DSA software development begins for the Starling 1.5+ mission extension.
- September 2024: LPNT simulation demonstration concludes successfully.
- October 2024: DSA’s extended mission as part of Starling 1.5+ begins.
NASA Ames leads the Distributed Spacecraft Autonomy and Starling projects, with funding support from NASA’s Game Changing Development program within the agency’s Space Technology Mission Directorate. The Starling mission and the DSA project are managed and funded by NASA’s Small Spacecraft Technology program within the same directorate.