


A groundbreaking development in robotics has emerged from the collaborative efforts of researchers at MIT and Stanford University, who have unveiled a vine-inspired robot gripper capable of lifting both heavy and fragile items. This novel technology, which mimics the growth patterns of vines, could soon find applications in various settings, including agriculture, eldercare, and heavy industry.
The team, led by Kentaro Barhydt, a PhD candidate at MIT, and O. Godson Osele from Stanford, presented their innovative design in the journal Science Advances. Barhydt explains that the robot gripper’s ability to transform between open and closed loops allows it to gently lift individuals, potentially easing the physical burden on caregivers.
Revolutionizing Eldercare
In eldercare settings, transferring a person out of bed is a physically demanding task for caregivers. Barhydt notes,
“Transferring a person out of bed is one of the most physically strenuous tasks that a caregiver carries out. This kind of robot can help relieve the caretaker, and can be gentler and more comfortable for the patient.”
The vine-inspired robot gripper offers a promising solution by gently snaking under and around a patient to create a sling, eliminating the need for physical maneuvering by caregivers.
Existing vine robots, primarily used for safety inspections and search and rescue operations, are designed as open-loop systems. However, the MIT and Stanford team realized that closing the loop could enable these robots to securely lift and transport objects, including human bodies.
Innovative Design and Functionality
The new robotic gripper combines open- and closed-loop actions. In its open-loop configuration, the robot can grow and twist around an object to achieve a firm grasp. Once secured, it can continue to grow back toward its source, forming a closed loop that facilitates the lifting process.
Harry Asada, Ford Professor of Engineering at MIT, highlights the significance of this advancement:
“Heavy but fragile objects, such as a human body, are difficult to grasp with the robotic hands that are available today. We have developed a vine-like, growing robot gripper that can wrap around an object and suspend it gently and securely.”
Broader Applications and Future Prospects
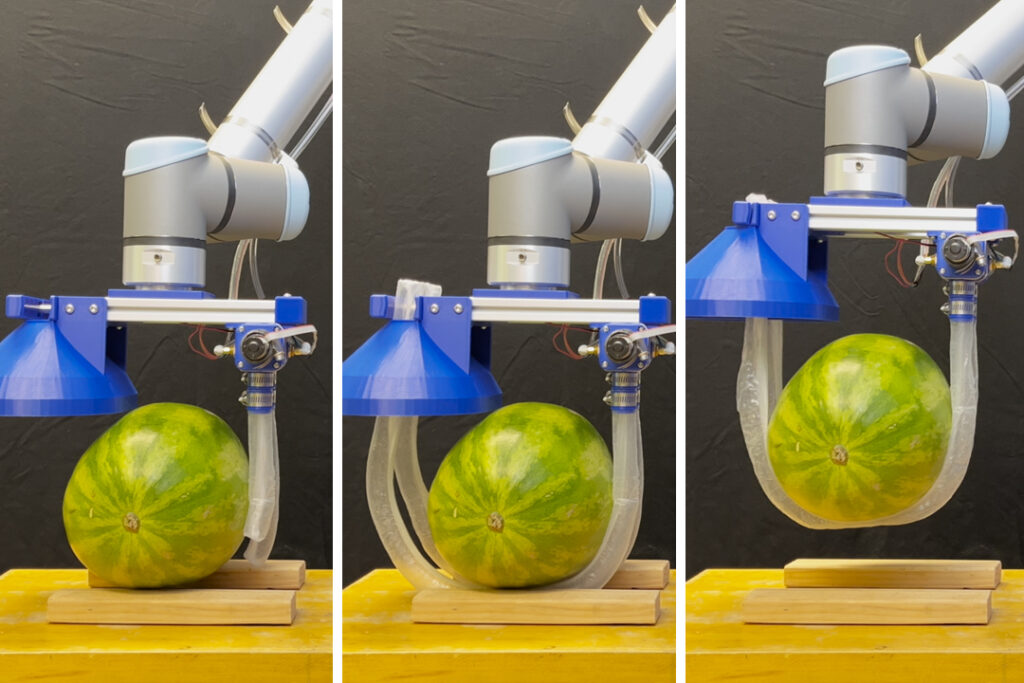
While the initial focus was on eldercare, the researchers quickly recognized the potential for broader applications. The team constructed a smaller version of the vine robot that can attach to commercial robotic arms, demonstrating its ability to handle a variety of objects, from a watermelon to a glass vase.
Co-lead author Osele expresses optimism about the future:
“There’s an entire design space we hope this work inspires our colleagues to continue to explore. I especially look forward to the implications for patient transfer applications in health care.”
Co-author Allison Okamura adds,
“I am very excited about future work to use robots like these for physically assisting people with mobility challenges. Soft robots can be relatively safe, low-cost, and optimally designed for specific human needs, in contrast to other approaches like humanoid robots.”
The team’s research, supported by the National Science Foundation and the Ford Foundation, opens new avenues in robotics, with potential applications in heavy industry and automated operations at ports and warehouses. Barhydt concludes,
“We think this kind of robot design can be adapted to many applications. We are also thinking about applying this to heavy industry, and things like automating the operation of cranes at ports and warehouses.”
As the field of robotics continues to evolve, innovations like the vine-inspired robot gripper promise to transform industries and improve quality of life, particularly for those in need of assistance with mobility and care.